Week 1
Aim of the project
The main aim for our project is to create an object avoidance vehicle that will use both ultrasonic sensors and camera detection to determine any objects that are in the vehicle's path, as well as the surrounding area on all sides to then adjust the speed/direction accordingly.
To start off, we set out each component of the project:
The main drivetrain consisting of 4 motors and 2 dual motor controllers.
4 Ultrasonic sensors, 1 on each side, to provide an estimation of the surrounding area around the car.
A Raspberry PI AI camera that will be used for the camera detection and image processing.
All of the above components will be controlled and powered by a Raspberry PI 4 Model B.
Goals of the project as decided so far
Use the Raspberry PI AI Camera along with specific image processing models to detect objects and signs relating to road networks in the UK, for example traffic lights and stop signs.
Use the ultrasonic sensors to provide estimations of distance between obstacles and the car on each of the 4 sides in order to take action and avoid collisions as well as perform manoeuvres into open spaces and not other obstructions.
Create and write a program that connects the motor controllers, camera and ultrasonic sensors together in order to allow each component to work with each other to control the motor speed and direction of the wheels.
Summary of the first week in the lab
To start off the first week of our project, we checked and verified our components had all arrived and where working before getting started with our work.
We then split into 2 sub groups, one focusing on the motor controllers, sensors and chassis and one focusing on setting up the image processing software.
The first subgroup connected all of the components to the chassis, along with starting to work with the circuit by connecting parts together.
Top view of the chassis progress so far
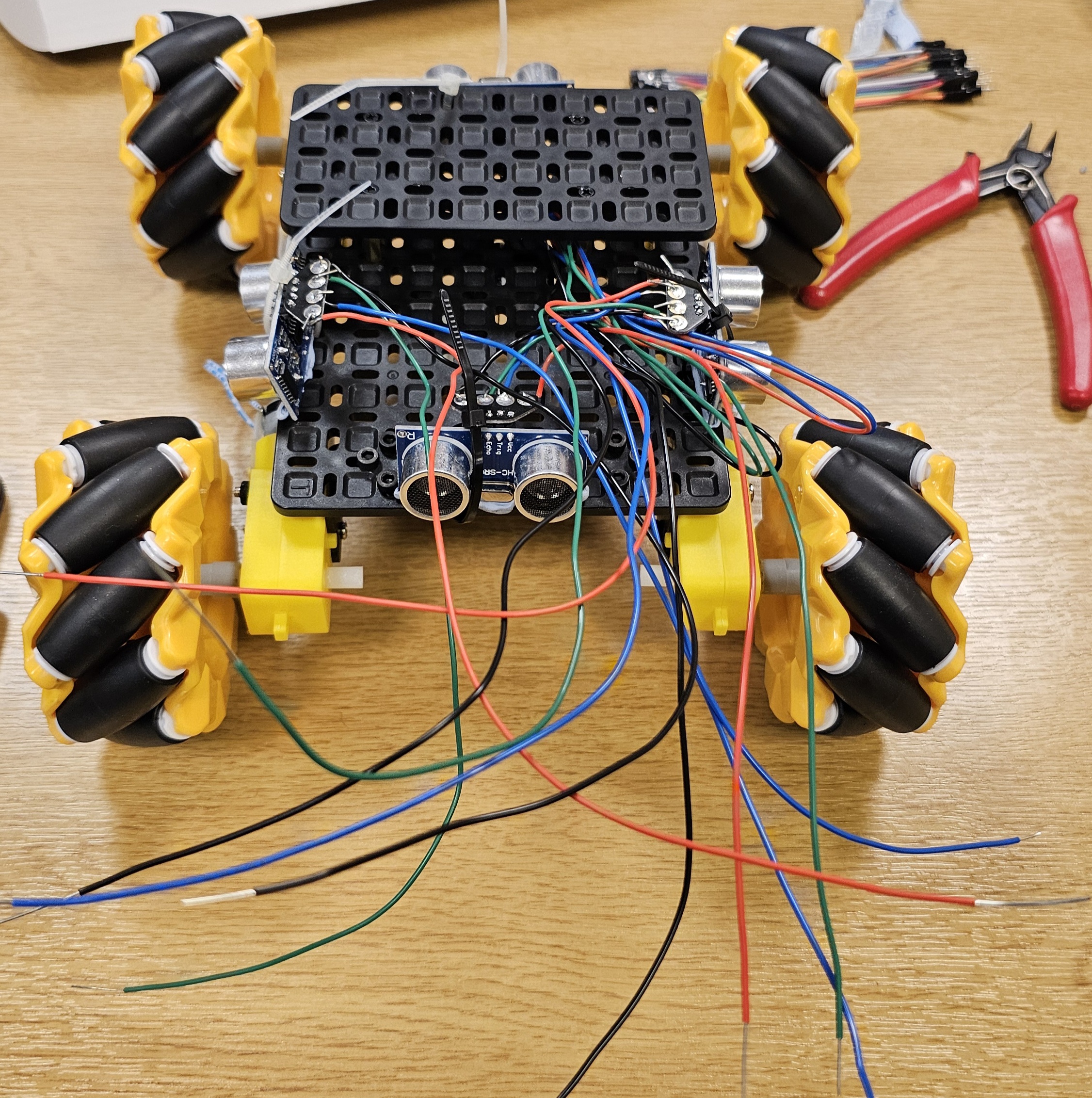
Underside view of the chassis progress so far

The second subgroup working on the software set up all of the dependencies for the camera and the image processing capabilities, along with testing the battery for the Raspberry PI and verifying it is all fully functional.
Image showing the camera connected to the Raspberry PI, along with the battery that is connected on top via a dedicated board in HAT form factor

Issues, reflections and future direction
The group as a whole encountered a few issues, the first being an issue for mounting the ultrasonic sensors to the chassis. Upon reflection, the group will most likely create custom mounting for the sensors to ensure that they are sufficiently secured and will provide as accurate of measurements as possible.
The circuit that the group started working on was not working as intended, therefore a revised design was created and will be implemented into the project next week.
The revised design is shown below

For the image processing side of things, there seems to be no model specifically for the use that we have set out for the project, so looking into the future, we will attempt to see if it is possible to develop/train our own AI model in order to achieve the desired results.

